オートローダ
電源を入れるだけで、1MBのEEPROMに保存されたBASICプログラムを自動で読み込み、BASICマイコンで実行する「オートローダ」を作成した。 オートローダの主な機能は次の通り。 あらかじめ最初に起動するBASICプログラムを指定しておくと、電源投入後に自動でロード・実行される。 その後は、実行中のBASICプログラムから次に起動するプログラムを指定できる。 もし次のプログラムを指定せずに終了した場合は、最初に設定したプログラムが再び起動する。
この動画では、最初にメニューを起動している。 パックマンを選択すると、10秒程度でパックマンが起動し、ゲームが終わると、パックマンのプログラムでは次に実行するプログラムを指定していないため、メニューが再度起動する。
使い方
使い方は簡単。プロジェクトファイルを書き込んで、BASICマイコンに接続して電源を入れるだけ。
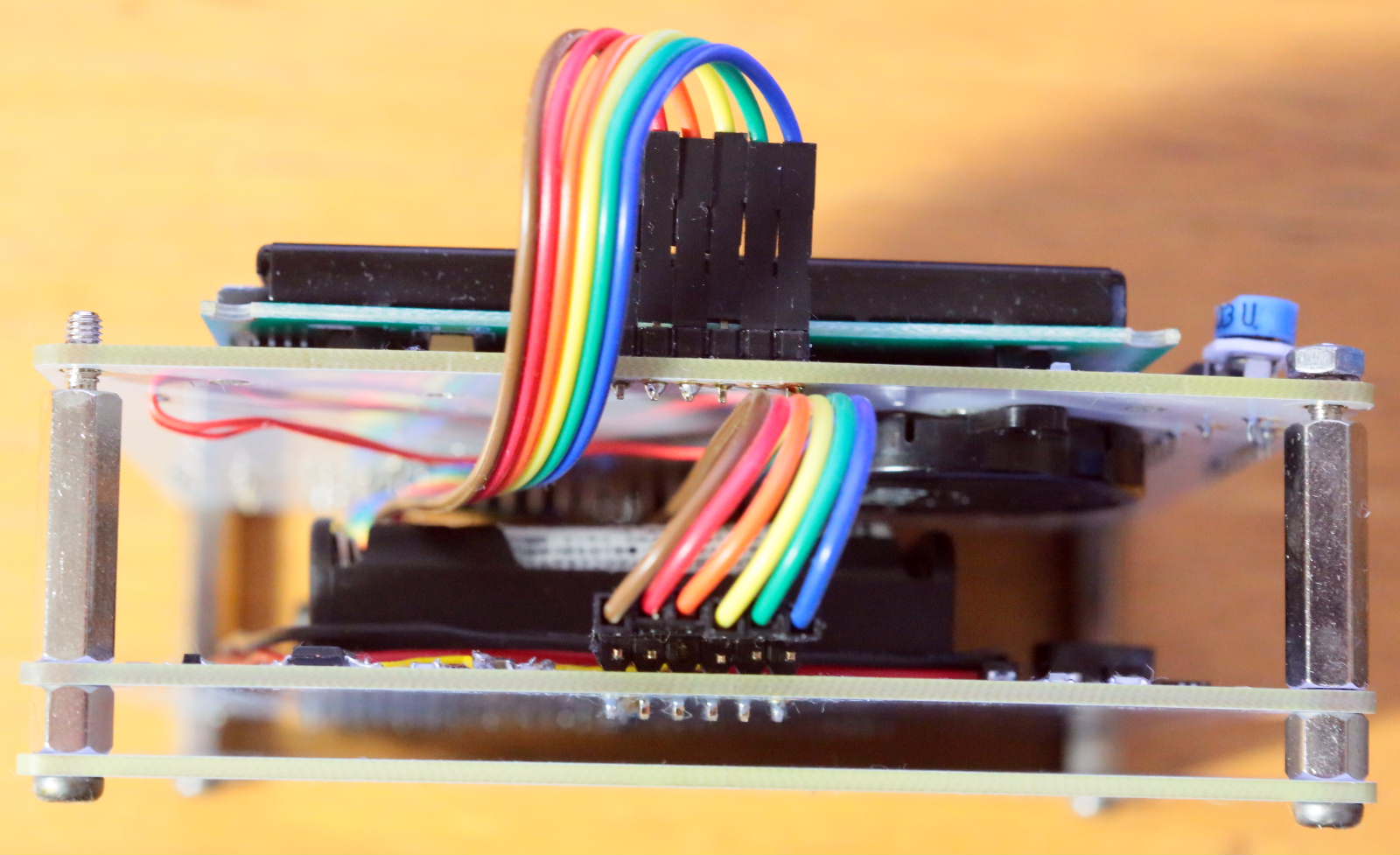
オートローダのコネクタは2段になっている。プロジェクトファイルを書き込むときは、下側のピンを使う。
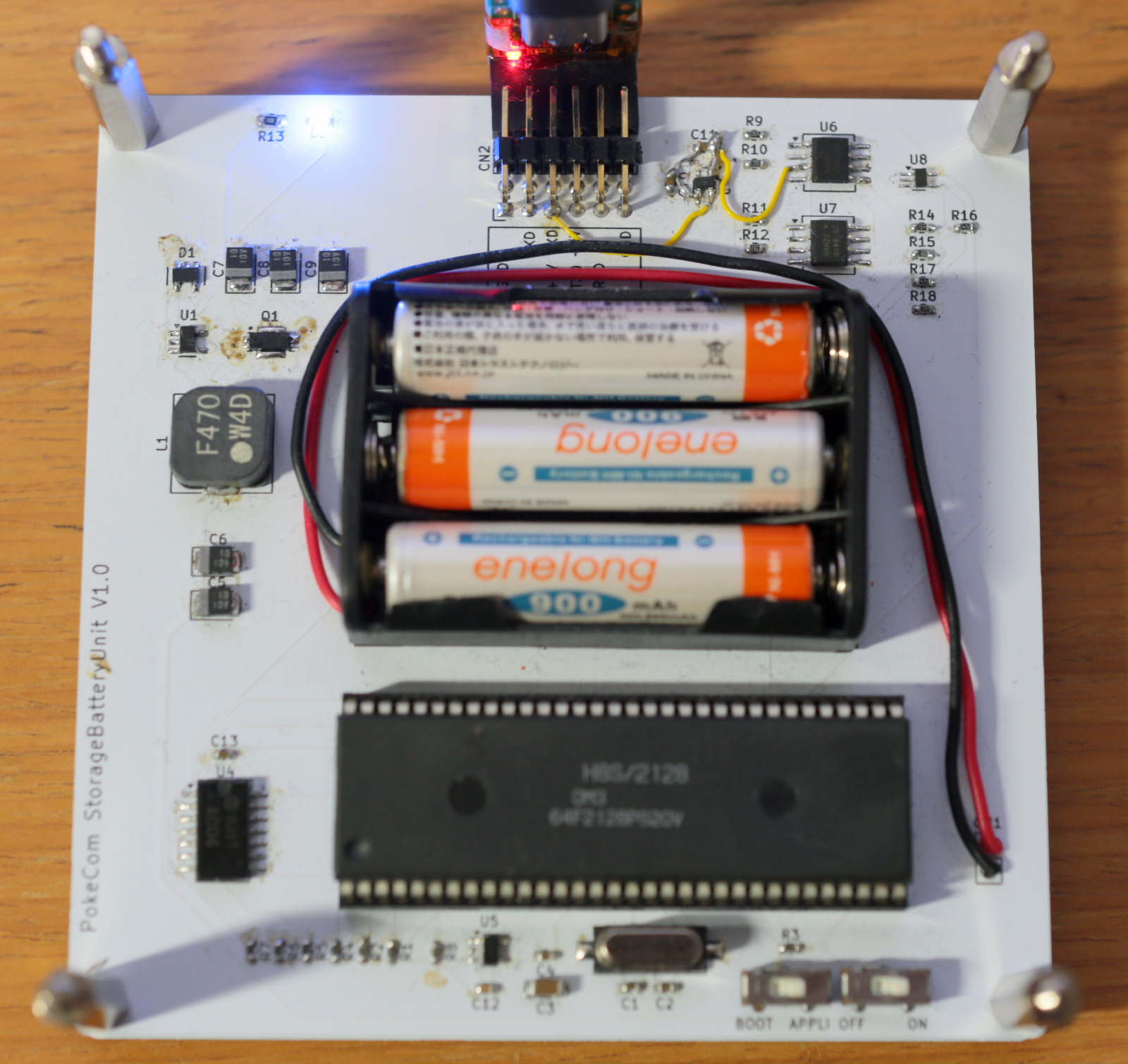
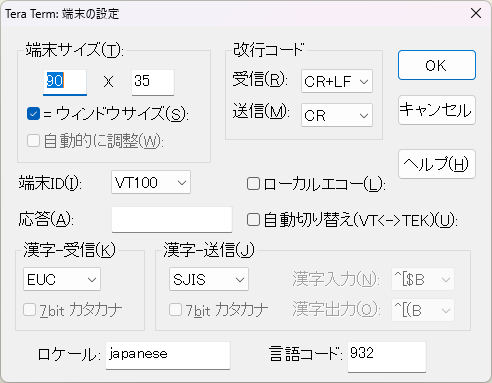
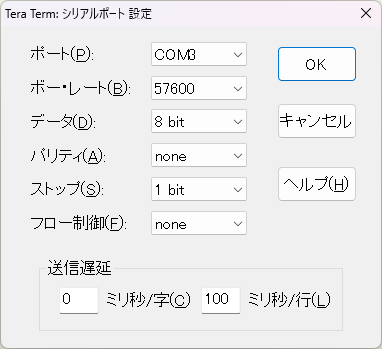
プロジェクトファイルの書き込みは、BASICマイコンと同じ変換基板を使って、左の写真のようにPCに接続して行う。 TeraTermの設定は、下の通り。送信側の文字コードをSJISにする点がBASICマイコン接続時と異なるので注意。 AUTOLOADERを接続しても、TeraTermには何も表示されない。エコーもないので、キー入力されたと仮定して操作する必要がある。 プロジェクトファイルの書き込み手順は以下の通り。 1) EEPErase ⏎ 2) EEPDump 0⏎ 全てFFが表示されればOK。 3) TeraTermのメニューから「ファイル>ファイル送信(S)」を選択して、書き込むプロジェクトファイルを選択して、プロジェクトファイルを送信する。 4) EEPDump fff00⏎ プロジェクトファイルに書いたファイル名が表示されればOK。
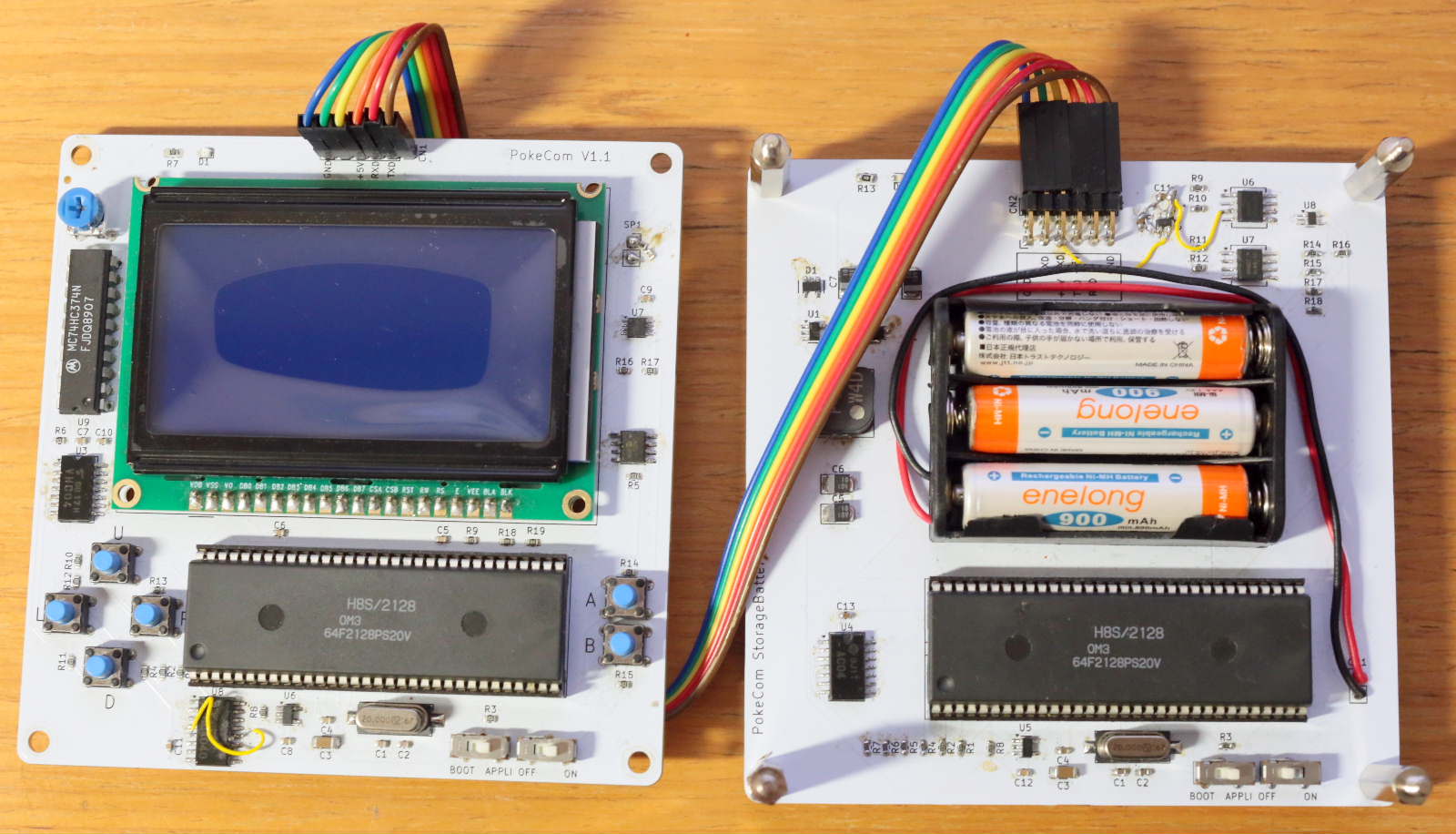
後は、BASICマイコンを接続して電源を入れるだけ。 BASICマイコンとオートローダのコネクタの上の段をケーブルで接続する。 BASICマイコンの2つのスイッチを両方ともONにした状態で、AUTOLOADERの電源を入れる。 プロジェクトファイルにAUTOEXEC.basというファイル名で登録したプログラムが起動すればOK。
プロジェクトファイル
プロジェクトファイルの形式を以下に示す。
・*** Project Start ****⏎で始まり、*** Project End ****⏎で終わる。
・@ファイル名の後に、ファイルの内容(BASICプログラム)を記述する。
・AUTOEXEC.basというファイル名を付けて、最初に実行するBASICプログラムを記述する。
・次に実行するプログラムを指定する時は、次に実行するプログラムのファイル名をprint文で出力して、プログラムを終わればよい。(プロジェクトファイル例のAUTOEXEC.basを参照)
【プロジェクトファイルのイメージ】
*** Project Start ****
@AUTOEXEC.bas
ファイル内容
@ファイル名
ファイル内容
@ファイル名
ファイル内容
*** Project End ****
冒頭の動画で使ったプロジェクトファイル
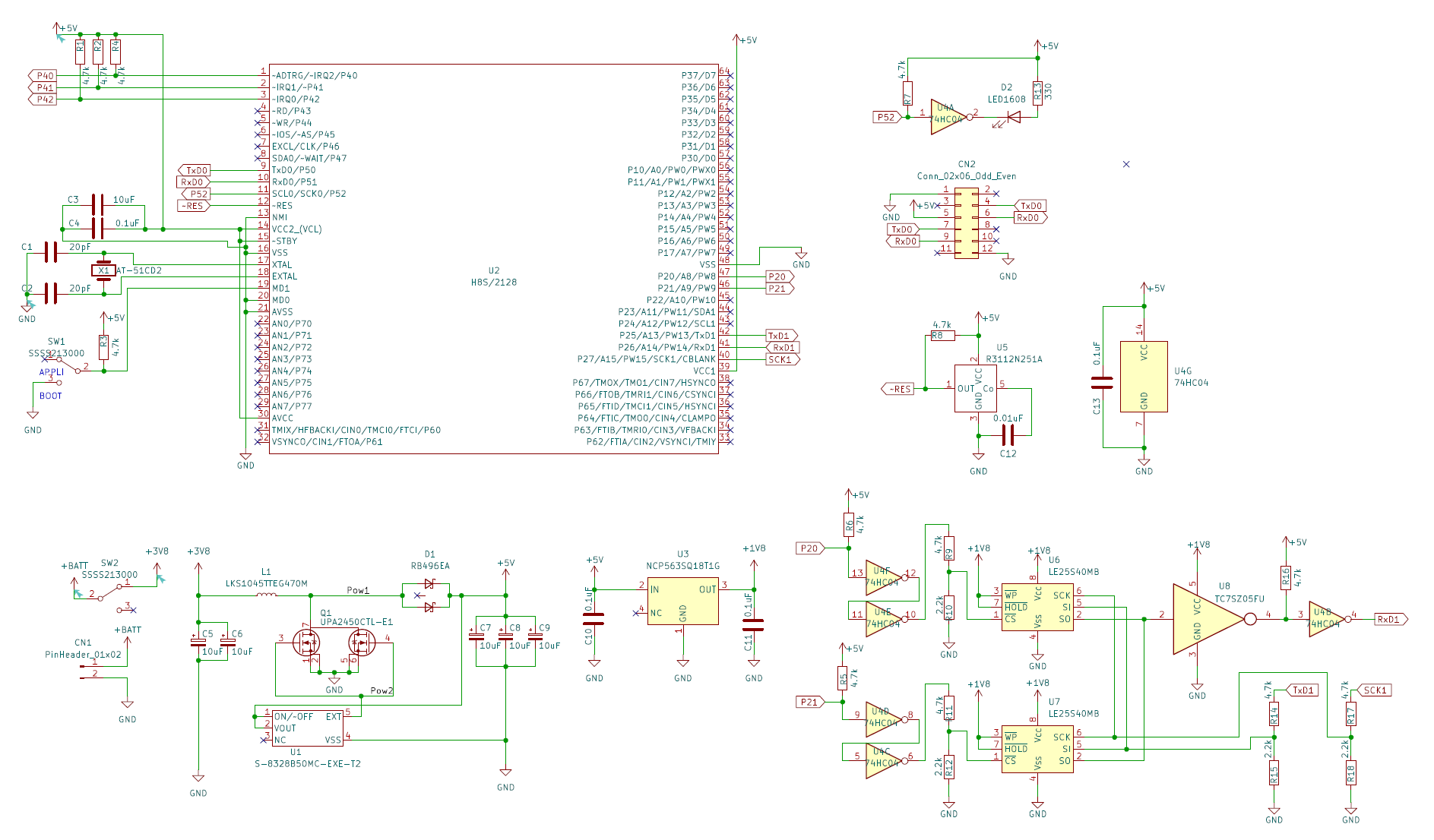
回路図
V1.0パッチ
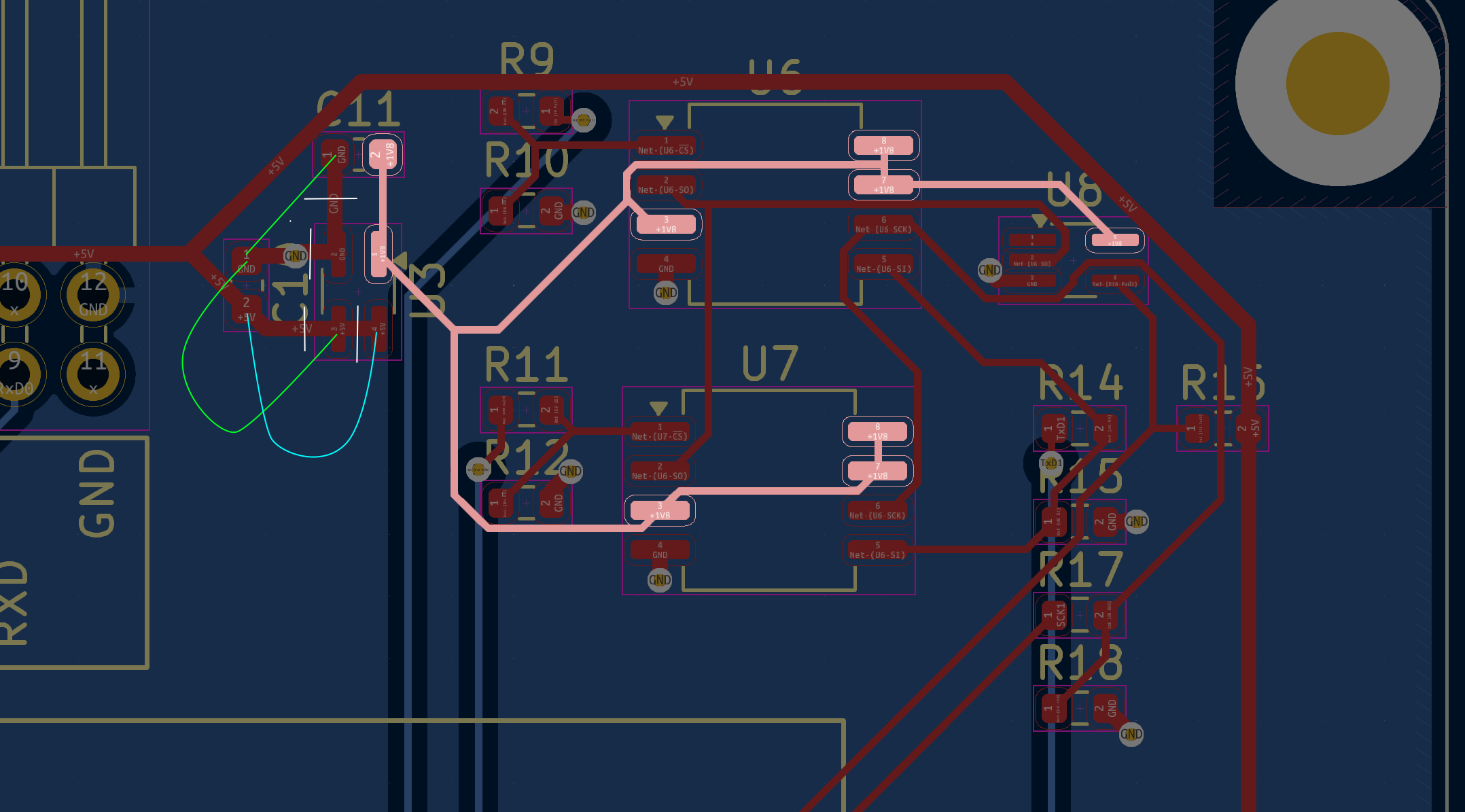
回路図は既に修正済だが、V1.0基板のパッチをまとめた。 下記の修正で動くようになった。(原因は、シンボルとフットプリントが不一致のまま、基板を作ってしまったため><) ・白で示した4か所をパターンカット ・緑とシアンの2本をパッチで接続